圧力センサーはロボット工学における空気圧制御をどのように強化できますか?
自動化とインダストリー 4.0 の発展の一環として、ロボットは「よりスマート」になる必要がありました。1 自動化に関して言えば、よりスマートなロボットとは、データ分析およびフィードバック システムと統合できる、より高度なセンサーを備えたロボットです。
業界で最も一般的なロボット タイプの XNUMX つは、ロボット アームです。 物体の持ち上げや移動から、高精度の製造および溶接プロセスまで、さまざまな用途があります。
多関節ロボットとして、ロボット アームは、指定されたタスクに合わせて可動範囲を設計することができ、必要な動作を実行できます。
ロボットアーム 人間の同等物よりもはるかに速く動く能力があるため、効率が大幅に節約されます。 また、製造プロセスに含まれる多数の反復タスクで高い精度を維持します。 タスクによっては、ロボット アームを簡単にインストールしてプログラムし、目的の機能を実行することができます。
ただし、ロボット アームがマシン ビジョンまたはより高度な自動化と組み合わせて使用される代替タスクの場合、ロボットは周囲の環境の変化に反応して理解できる必要があります。
ロボットが周囲の世界を理解し、事前にプログラムされたハードコードされたパラメーターを単に必要としない方法でタスクに反応できるようにする XNUMX つの方法は、圧力センサーの利用です。
ロボット用の変換器ベースのセンサーの開発により、繊細な物体を保持できる高度に洗練された多関節ロボット ハンドの作成が可能になりました。2 センサ情報はアクチュエータに伝達され、過度の力の使用を回避します。

圧力トランスデューサー
ますます複雑なモーションと自動化の度合いを達成するには、さらに多くのセンサーを利用する必要があります。 高度に関節運動するロボットハンドまたはアームには、アプリケーションにとって重要になるセンサーサイズなどの考慮事項とともに、完全なセンサー一式が必要です。
複雑なセンサーネットワークがロボットにフィードバックシステムを提供する場合、センサーの精度と精度も次第に重要になります。
ネットワーク内のいずれかのセンサーが不適切な動作を開始すると、結果として生じるロボットの動きが正しくなくなり、ロボットの関節に問題のある動きや偶発的な破損が発生する可能性があります。
高度な自動化と製造プロセスにおけるデータの利用に加えて、インダストリー 4.0 開発のもう XNUMX つの側面は、持続可能性をより重視することです。
モバイル ロボット アームは、次の充電までの動作寿命を延ばすために、消費電力を最小限に抑える必要があります。 センサーの大きな電力消費を回避することで、ロボットの運用コストを最小限に抑え、余分なエネルギー消費を減らすこともできます。
圧測定
ロボット アームの最も一般的なタスクの XNUMX つは、オブジェクトを保持して持ち上げることです。 空気圧アクチュエータは、通常は圧縮空気からのエネルギーを運動に変換します。このようなアクチュエータは、多くの移動ロボットの基礎を構成しています。
物体に適切な量の力を加えるには、アクチュエータに供給される圧縮空気の量を注意深く制御する必要があります。 これは一般に、排気領域内の真空圧を測定することによって達成されます。 圧力センサー はこれに最適なシステムです。
アクチュエータで対象物をピックアップするために加えられる最初の力に加えて、一定レベルの力が維持されることを保証するために、保持中の真空圧を継続的に監視するために圧力センサーを利用することができます。
空気圧式アクチュエータの圧力センサーは、急激な圧力変化に対する迅速な応答時間が求められます。特に、物理的な動作が高速でなければならないロボットの場合はそうです。 また、センサーは高感度で、真空圧力範囲で測定できる必要があります。
メリットセンサーシステム
ロボット アームの圧力センサーの利点は、より高度なタスクをより広範囲に実行できる動的に応答するロボットを作成する場合に明らかになります。 課題は、タスクに適した圧力センサーを見つけることです。
Merit Sensor Systems は、MEMS ピエゾ抵抗圧力センサーの開発に関する専門家であり、さまざまなコンパクトで低電力のセンサーを提供しています。
Merit Sensors には、スマート ロボティクス用の完全に補償された圧力センサー パッケージである CMS シリーズがあります。
ASIC を備えたピエゾ抵抗圧力センサーに基づいて、熱および非線形性を校正および補正する CMS シリーズは、非常に安定した長期的な圧力測定値を提供するために作成された非常にコンパクトなセンサーです。
CMSシリーズ
わずか 6.8 mm x 6.8 mm のフットプリントで、 CMSシリーズ 多数のセンサーを空気圧ロボットシステムに簡単に統合できます。
デジタル・アイ2C および SPI 出力オプションにより、CMS センサーをスマート フィードバック システムに簡単に統合し、応答性の高いロボット工学を実現できます。 アプリケーションに複数のセンサーが必要な場合、メリット センサーは他のセンサーを作成することもできます。2リクエストに応じてCアドレス。
独自のSentiumの組み込み® 技術は、CMS シリーズのパフォーマンスをユニークにします。 この技術により、これらのセンサーはクラス最高の安定性で広い補償温度範囲 (0 ~ 50 °C または -15 ~ 85 °C) を達成できます。
CMS シリーズは、2 ~ 150 PSI の広範な動作圧力範囲と、最大動作圧力の 2 ~ 100 倍の破裂圧力を持つ非常に多様なセンサーです。
空気圧ロボットの場合、この範囲は高い精度と安定性と相まって、最もデリケートな持ち上げ作業だけでなく、より過酷な作業にも対応できるロボットを作成できることを意味します。
オートゼロ機能と出力平均化機能に加えて、必要に応じて絶対オプションとゲージ オプションも提供されるため、CMS シリーズはさらに使いやすく、あらゆるシステムに統合できます。
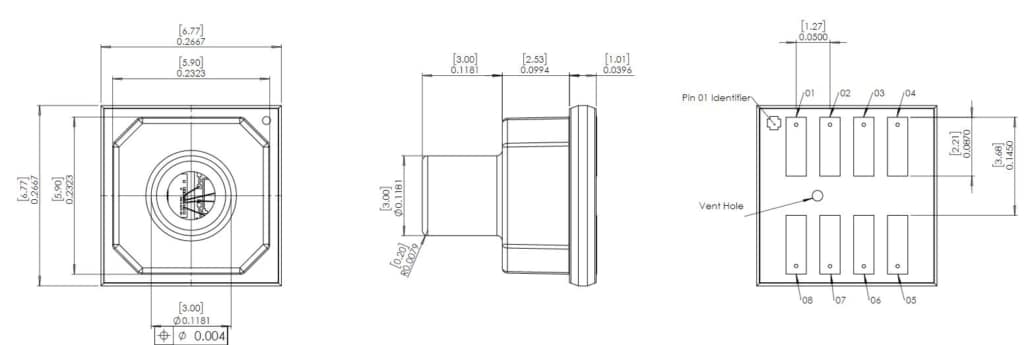
電気接続は 1.27 mm の標準間隔の SMD はんだパッドで、CMS 製品は 2.7 ~ 5.5 V の供給電圧範囲と互換性があります。 エネルギー効率を最大化するために、デバイスを低電力モードで実行することができます。
CMS 製品はすべて RoHS に準拠しており、これらのセンサーの信頼性と精度は、ガラスを化学的にエッチングされたシリコン ダイアフラムに陽極接合するように設計されたピエゾ抵抗ホイートストン ブリッジによって支えられています。
コンタクトメリットセンサーシステム CMS シリーズが空気圧ロボットの性能と精度、およびシステムの全体的な効率をどのように向上させるかをご覧ください。

参考情報
- Sartal, A., Bellas, R., Mejías, AM, & García-Collado, A. (2020). インダストリー 4.0 内の持続可能な製造の概念、進化、および機会: 文献レビュー。 機械工学の進歩、12とします。 https://doi.org/10.1177/1687814020925232
- Girão, PS, Ramos, PMP, Postolache, O., & Miguel Dias Pereira, J. (2013). ロボット用途向けの触覚センサー。 測定: 国際測定連盟のジャーナル、46(3)、pp。1257–1271。 https://doi.org/10.1016/j.measurement.2012.11.015
詳細については、次の記事を参照してください。 AZOSensors.com




